Wir betrachten ein kontinuierliches autonomes dynamisches System,
also ![]() gekoppelte Differentialgleichungen erster Ordnung,
gekoppelte Differentialgleichungen erster Ordnung,
Alle folgenden Überlegungen sind lokal in dem Sinn, daß das Vektorfeld lediglich in der Nähe des Fixpunktes untersucht wird und die durchzuführenden Koordinatentransformationen nur in einer Umgebung des Fixpunktes ,,beliebig genau`` angegeben werden können.
Wir beschränken uns auf Vektorfelder
![]() ,
die als vektorwertige Potenzreihe vorliegen:
,
die als vektorwertige Potenzreihe vorliegen:
 |
(1.3) |
 |
(1.4) |
 |
(1.5) |
Mit Hilfe der Multiindex-Notation vereinfachen wir die Darstellung von
![]() ,
,
 |
(1.6) |
 |
(1.7) |
Der lineare Anteil des Vektorfeldes
![]() kann mit Hilfe der
Jacobi-Matrix
kann mit Hilfe der
Jacobi-Matrix
| (1.8) |
| (1.9) |
Die fundamentale, der gesamten Normalformentheorie für
Differentialgleichungen zugrunde liegende Idee Poincarés
war es, das Vektorfeld durch eine -- in der Regel unendliche -- Folge
von Transformationen systematisch zu linearisieren.
Wenn dieses Programm ohne Abstriche durchgeführt werden
kann1.3,
wenn man also eine (lokal) invertierbare Koordinatentransformation
![]() mit
mit
| (1.11) |
 |
(1.12) |
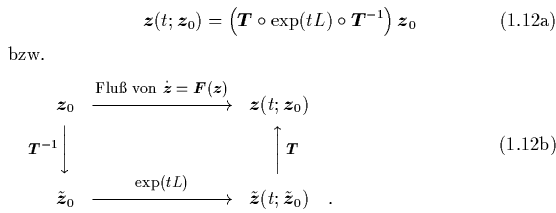
Es bleibt also zu zeigen, ob und wie die linearisierende Transformation
(1.12) bestimmt werden kann. Hierfür untersuchen wir
zunächst, wie sich die Transformation
![]() ,
,
 |
(1.13) |
Punkt (i) ermöglicht die Anwendung eines iterativen Verfahrens für die
Normalisierung des Vektorfeldes: Für ![]() transformieren wir
sukzessive mittels einer ,,Erzeugenden``
transformieren wir
sukzessive mittels einer ,,Erzeugenden``
![]() . Dabei ist durch (i)
sichergestellt, daß das Ergebnis der vorangegangenen Transformationen
. Dabei ist durch (i)
sichergestellt, daß das Ergebnis der vorangegangenen Transformationen
![]() mit
mit ![]() , d. h. die weitestmögliche Eliminierung der
Grad
, d. h. die weitestmögliche Eliminierung der
Grad ![]() -Terme des Vektorfeldes, durch
-Terme des Vektorfeldes, durch
![]() nicht mehr verändert
wird.
nicht mehr verändert
wird.
Mit Hilfe von (ii) können wir genauer formulieren, was ,,Normalisierung``
in diesem Zusammenhang überhaupt bedeuten kann. Im Sinne der
Poincaréschen Idee wollen wir mit der von
![]() erzeugten
Transformation die Vektorfeldanteile vom Grad
erzeugten
Transformation die Vektorfeldanteile vom Grad ![]() zum
Verschwinden bringen, also
zum
Verschwinden bringen, also
Zur Diskussion von Gl. (1.19) definieren wir
| (1.16) |
 |
(1.17) |
Damit erhalten wir für die zu lösende Gl. (1.19):

Eine Gleichung dieses Typs heißt nach Arnold [Ar83]
homologische Gleichung. ![]() und
und
![]() sind bekannt,
sind bekannt,
![]() ist zu bestimmen.
Die Formulierung von Gl. (1.19) in der Form von Gl. (1.23)
erscheint an dieser Stelle unnötig kompliziert. Im Hinblick auf die
im Anschluß zu besprechende Verallgemeinerung der Bedingung
ist zu bestimmen.
Die Formulierung von Gl. (1.19) in der Form von Gl. (1.23)
erscheint an dieser Stelle unnötig kompliziert. Im Hinblick auf die
im Anschluß zu besprechende Verallgemeinerung der Bedingung
![]() , Gl. (1.23b'), erweist sich diese Darstellung aber
tatsächlich als sinnvoll.
, Gl. (1.23b'), erweist sich diese Darstellung aber
tatsächlich als sinnvoll.
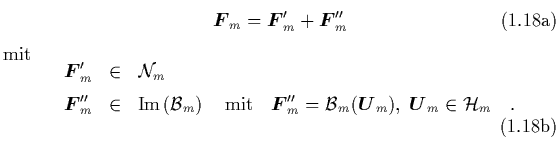
Falls für diese Gleichung eine Lösung
![]() existiert, findet man sie mit Hilfe der Zerlegung von
existiert, findet man sie mit Hilfe der Zerlegung von ![]() in den
Bildvektorraum
in den
Bildvektorraum
![]() von
von ![]() und einen dazu
komplementären Untervektorraum
und einen dazu
komplementären Untervektorraum ![]() :
:
| (1.18) |
Die Bedingung
![]() ist im allgemeinen nicht
erfüllt.
Wenn
ist im allgemeinen nicht
erfüllt.
Wenn
![]() ist, dann kann man die homologische Gleichung
zwar nicht mehr
mit
ist, dann kann man die homologische Gleichung
zwar nicht mehr
mit
![]() lösen,
wohl aber sie dieser Lösung so nahe wie möglich bringen, indem man
lediglich fordert, daß die schwächere Nebenbedingung
lösen,
wohl aber sie dieser Lösung so nahe wie möglich bringen, indem man
lediglich fordert, daß die schwächere Nebenbedingung
![]()
![]()
erfüllt wird. Eine -- nicht eindeutige -- Lösung der homologischen
Gleichung unter dieser schwächeren Nebenbedingung
(1.23b') findet man mit

Wir haben demnach nicht nur die erzeugende Funktion
![]() der
Transformation geeignet zu wählen, sondern wir müssen auch
der
Transformation geeignet zu wählen, sondern wir müssen auch
![]() so bestimmen, daß es im Kern von
so bestimmen, daß es im Kern von ![]() liegt.
liegt.
![]() kann gegebenenfalls auch
kann gegebenenfalls auch ![]() sein; dies hängt
von dem anfangs in Gl. (1.3) vorgegebenen Vektorfeld
sein; dies hängt
von dem anfangs in Gl. (1.3) vorgegebenen Vektorfeld
![]() ab.
ab.
Die durch die Transformation (1.16) nicht
wegtransformierbaren Anteile
![]() heißen resonant.
Eine Motivation dieser Bezeichnungsweise findet sich beispielsweise in
[Wi90]. Man vergleiche auch die im nächsten Abschnitt abgeleitete
Resonanzbedingung (1.40).
heißen resonant.
Eine Motivation dieser Bezeichnungsweise findet sich beispielsweise in
[Wi90]. Man vergleiche auch die im nächsten Abschnitt abgeleitete
Resonanzbedingung (1.40).
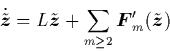
Mit einer Induktion nach ![]() erhalten wir somit
erhalten wir somit
| (1.18) |
 |
(1.19) |
Die Anwendung des Poincaré-Dulac-Theorems in der Nähe eines hyperbolischen Fixpunktes beweist den formalen Teil des Hartman-Grobman-Theorems. Daß die linearisierende Transformation nicht nur eine formale Potenzreihe, sondern sogar ein Homöomorphismus ist, läßt sich auf diese Weise allerdings nicht nachweisen [GuHo83].
Die Transformation eines Vektorfeldes auf seine Normalform kann eine wesentliche Vereinfachung darstellen. Bifurkationstheorie wäre beispielsweise nicht möglich ohne die Klassifizierung von Vektorfeldern mit den Mitteln der Normalformentheorie [IoAd92]. Im Hinblick auf die Konstruktion einer vollständigen Lösung der Differentialgleichung gemäß Gl. (1.15a) stellt jedoch jeder resonante Term des Vektorfeldes eine unüberwindliche Hürde dar, weil er die Linearisierung unmöglich macht.
Die Normalformentheorie ist eine formale Theorie: Die einzelnen
Beiträge
![]() zur Erzeugenden und die resonanten Terme
zur Erzeugenden und die resonanten Terme
![]() des Vektorfeldes können zwar sukzessive für alle Grade
des Vektorfeldes können zwar sukzessive für alle Grade
![]() bestimmt werden, aber über das Konvergenzverhalten von
bestimmt werden, aber über das Konvergenzverhalten von
![]() bzw.
bzw.
![]() kann im allgemeinen keine Aussage
gemacht werden, und oft divergieren diese Reihen. Konvergenzaussagen in
einigen speziellen Fällen gehen auf Poincaré und Siegel zurück und
werden in [SiMo71,Ar83] erörtert.
Beispiele divergenter
Transformationen auf Normalform -- im Rahmen der Dragt-Finn-Stegemertenschen
Normalformentheorie für Hamilton-Systeme -- werden in den Kapiteln
4 und 5 diskutiert.
Selbst im Fall der Divergenz reichen aber oft schon die niedrigsten Terme
der Normalform und der damit konstruierten näherungsweisen Lösung
aus, um beispielsweise das Phasenportrait des Systems qualitativ
angeben zu können [Ar83].
kann im allgemeinen keine Aussage
gemacht werden, und oft divergieren diese Reihen. Konvergenzaussagen in
einigen speziellen Fällen gehen auf Poincaré und Siegel zurück und
werden in [SiMo71,Ar83] erörtert.
Beispiele divergenter
Transformationen auf Normalform -- im Rahmen der Dragt-Finn-Stegemertenschen
Normalformentheorie für Hamilton-Systeme -- werden in den Kapiteln
4 und 5 diskutiert.
Selbst im Fall der Divergenz reichen aber oft schon die niedrigsten Terme
der Normalform und der damit konstruierten näherungsweisen Lösung
aus, um beispielsweise das Phasenportrait des Systems qualitativ
angeben zu können [Ar83].